Online Visual Object Tracking for UAV
 Tracking Experiments on Tongji Univ. Jiading Campus
Tracking Experiments on Tongji Univ. Jiading Campus
-
Undergraduate Research Assistant, Oct. 2018 - Oct. 2020
During this time, I focused on investigating visual object tracking for UAV based on correlation filter-based methods.
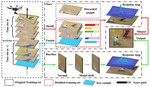
Among discriminative visual tracking methods, correlation filter (CF)-based approaches have received considerable attention for UAV tracking due to their high computational efficiency. In those methods, a 2D discriminative correlation filter is trained by minimizing the squared error over samples and their regression targets. Benefit from element-wise operation in the frequency domain, the CF-based methods usually have fast computational speed. In detection phase, a 2D response map is first obtained by correlating the trained filter, and new samples extracted from newly came image. Then the target location is predicted according to the highest peak of the response map. A bounding box is introduced circumscribe the target, indicating its location and representing its scale.
Related work has been published as follows:
- A cooperative energy minimization function is established to score the historical samples adaptively, optimizing the training-set’s quality efficiently and effectively. Training-Set Distillation for Real-Time UAV Object Tracking in ICRA 2020
- A dynamic constraint strategy is introduced to set up an adaptive restriction on the consistency level, exploiting rich temporal information in response maps thoroughly. Learning Consistency Pursued Correlation Filters for Real-Time UAV Tracking In IROS 2020
Publications
ReCF: Exploiting Response Reasoning for Correlation Filters in Real-Time UAV Tracking