Point Cloud Object Detection
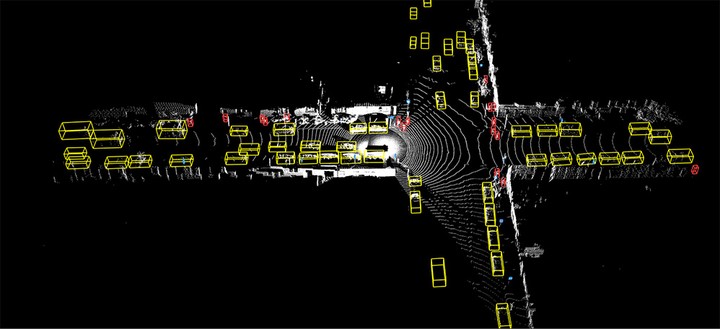 Detecting results on Waymo dataset
Detecting results on Waymo dataset
Algorithm intern in Hesai Tech, Jul. 2020 - Aug. 2020
During my internship at Hesai Tech, I focused on the point cloud-based object detection. Our work is based on OpenPCDet and Waymo Open Dataset. Based on the fact that it is easier for human to distinguish moving point clouds, we fused information from multiple frames to raise the overall accuracy of detection.
One of the challenges is to complete the evaluation toolbox. The toolbox from OpenPCDnet was developed based on KITTI Dataset, although now it has been upgrated from v0.1 to v0.2 with pretty new structures to support various datasets including Waymo. Due to differences in the structures of KITTI and Waymo, we had to adjust it to support Waymo dataset. Besides, as we used multiple frames while most other methods only consider the single frame, it’s worthy to consider carefully how to evaluate them fairly.
To raise the accuracy of detection using multiple frames, I developed several detectors with OpenPCDet. My favorite method is using ConvLSTM after bird-eye-view compression to introduce temporal information.
The internship at Hesai was not only a pleasant journey, as I made many valuable friends, I also learned to solve the problem from an engineer’s perspective.