Motion Planning for Excavator
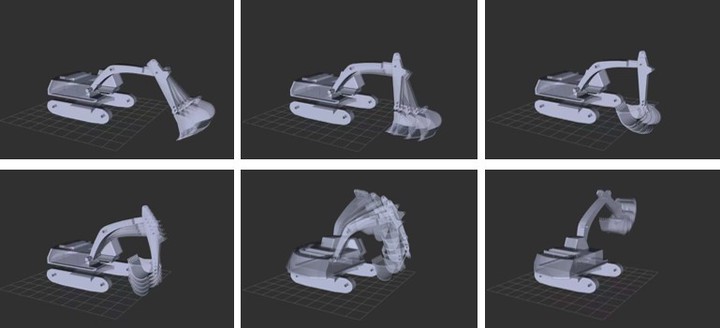 Simulation platform of the excavator-robot base on ROS
Simulation platform of the excavator-robot base on ROS
My bachelor’s thesis, Feb. 2021 - Jun. 2021
My bachelor’s thesis focuses on motion planning of excavator-robot supervised by Dr. Xiaotian Li. In this work, we extended IFDS (interfered fluid dynamical system) to high-dimensional space from 3-dimensional. We further demonstrated its completeness and optimality theoretically, and tested the method based on Matlab.
Besides, a kinematic model of the excavator-robot is established, and the necessary constraints that need to be met for motion planning in the mining process are analyzed. Based on ROS, a visual three-dimensional simulation platform of the excavator-robot is established, and the motion planning simulation experiments of the working device are designed based on a four-degree-of-freedom manipulator to verify the feasibility of the planning method and the simulation system.